مهمترین هدف هر نوع موس ، تبدیل حرکت دست به سیگنال هائی است که کامپیوتر قادر به استفاده از آنان باشد. موس برای ترجمه و نیل به هدف گفته شده از پنج عنصر اساسی استفاده می نماید.

- یک گوی ( گردی ) درون موس که سطح مورد نظر را لمس و زمانیکه موس حرکت می کند، می چرخد.
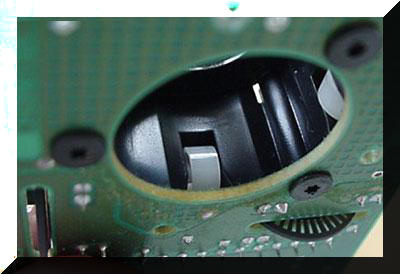
2 - دو غلتک (Rollers). غلتک های فوق گوی ( گردی ) را لمس می کنند. یکی از غلتک ها، قادر به تشخیص حرکت در جهت X باشد. غلتک دوم 90 درجه نسبت به غلتک اول جهت یابی شده تا بدین ترتیب حرکت در جهت Y را تشخیص دهد. زمانیکه گوی می چرخد یک و یا دو غلتک فوق نیز حرکت خواهند کرد.شکل زیر دو غلتک سفید رنگ موس را نشان می دهد.
3 - هر غلتک به یک میله ( محور) متصل بوده و میله باعث چرخش یک دیسک می گردد. زمانیکه یک غلتک می چرخد میله مربوط به آن بهمراه دیسک مربوطه نیز خواهند چرخید.شکل زیر دیسک را نشان می دهد.
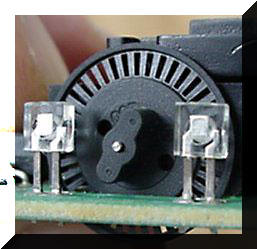
4 - در یکطرف دیسک یک LED مادون قرمز ودر طرف دیگر یک سنسورمادون قرمز، وجود دارد. سوراخ های موجود بر روی دیسک باعث شکست نور متصاعده شده توسط LED می شوند، بدین ترتیب سنسور مادون قرمز ، پالس های نور را مشاهده خواهد کرد.تعداد پالس ها ارتباط مستقیم با سرعت موس و مسافتی که موس حرکت می کند، خواهد داشت .
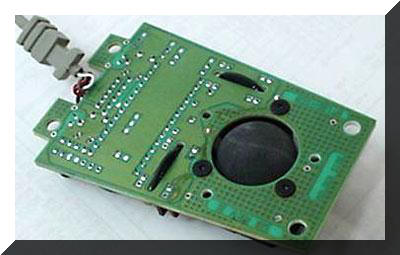
5 - یک تراشه پردازنده بر روی برد. پردازنده فوق پالس ها را خوانده و پس از تبدیل به باینری، آنها را از طریق کابل مربوطه برای کامپیوتر ارسال می دارد.

همانگونه که مشاهده گردید موس یک سیستم مبتنی بر نور و مکانیک است (Optomechanical) . موس بصورت مکانیکی حرکت کرده و یک سیستم نوری تعداد پالس های نوری را شمارش می نماید. در موس فرضی قطر گوی ( گردی ) 21 میلیمتر، قطر غلتک 7 میلیمتر است . دیسک دارای 36 سوراخ است . بنابراین در صورتیکه موس 24 میلیمنر ( یک اینچ ) حرکت نماید تراشه مربوطه 41 پالس نوری را تشخیص خواهد داد.
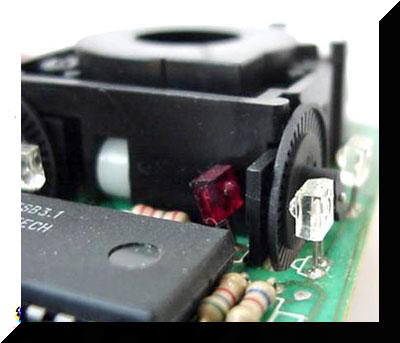
تا کنون متوجه این موضوع شده اید که هر دیسک دارای دو LED مادون قرمز و دو سنسور مادون قرمز است .(در هر طرف دیسک یک عدد). بنابراین درون موس چهار زوج LED/Sensor وجود دارد. ساختار و سازماندهی فوق به پردازنده امکان تشخیص جهت چرخش را خواهد داد. یک پلاستیک بسیار کوچک بین سنسور و دیسک وجود دارد .پلاستیک فوق در شکل قابل مشاهده است :
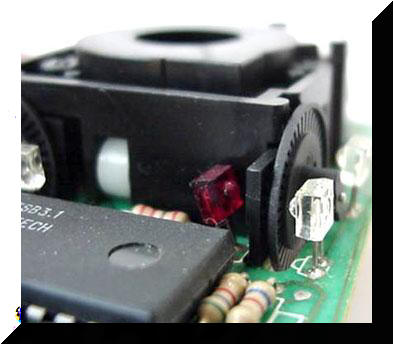
پلاستیک فوق یک پنجره برای سنسور را بمنظور روئت نور ، ایجاد می نماید. پنجره موجود در یکطرف دیسک با پنچره موجود در طرف دیگر دیسک در دو موقعیت مکانی متفاوت نسبت بهم قرار دارند.اختلاف موجود باعث می گردد که دو سنسور قادر به مشاهده پالس ها ی نوری در دفعات متفاوت باشند. برخی اوقات ممکن است یک سنسور پالسی را مشاهده نموده در صورتیکه سنسور دوم پالسی را مشاهده ننماید